2019/03/05掲載 検証場所:上ノ国町 洲崎館跡 検証協力:株式会社シン技術コンサル様
方法:対空標識の設置
GNSS測量によって3級基準点を4箇所設置し、フライト範囲内(約11ha)に対空標識(GCP)9点をトータルステーションを用いて設置した。各点の設置場所は、下図のとおりです。

各GCPの位置座標
| ID | X (m) | Y (m) | Z (m) |
| TH-1 | -243345.970 | -11007.657 | 3.736 |
| TH-2 | -243353.730 | -11175.842 | 1.826 |
| TH-3 | -243279.780 | -11079.671 | 11.554 |
| TH-4 | -243218.992 | -10965.704 | 8.782 |
| TH-5 | -243140.021 | -11009.946 | 9.456 |
| TH-6 | -243327.376 | -10807.459 | 4.313 |
| TH-7 | -243204.660 | -10809.125 | 5.361 |
| TH-8 | -243153.205 | -10829.613 | 9.890 |
| TH-9 | -243077.730 | -11038.109 | 5.050 |
方法:使用機材とフライトプラン
使用した機材及びフライトの詳細は、表のとおりである。本件では、地物の高さを4面で捉えるためにグリッド飛行を採用しました。また、成果物の用途が1/500相当の地形図であるため、地上分解能3cmを目標としました。
使用機材とフライトパラメータ
| 機体 | Inspire2 |
| カメラ | X4s |
| オーバーラップ率 (%) | 75, 57 |
| 高度 (m) | 110 |
| 速度 (km/h) | 23 |
| 地上分解能 (cm/pix) | 3.0 |
| 撮影頻度 (s) | 4.26 |
| シャッタースピード | 1/1000秒 |
| ISO | 100 |
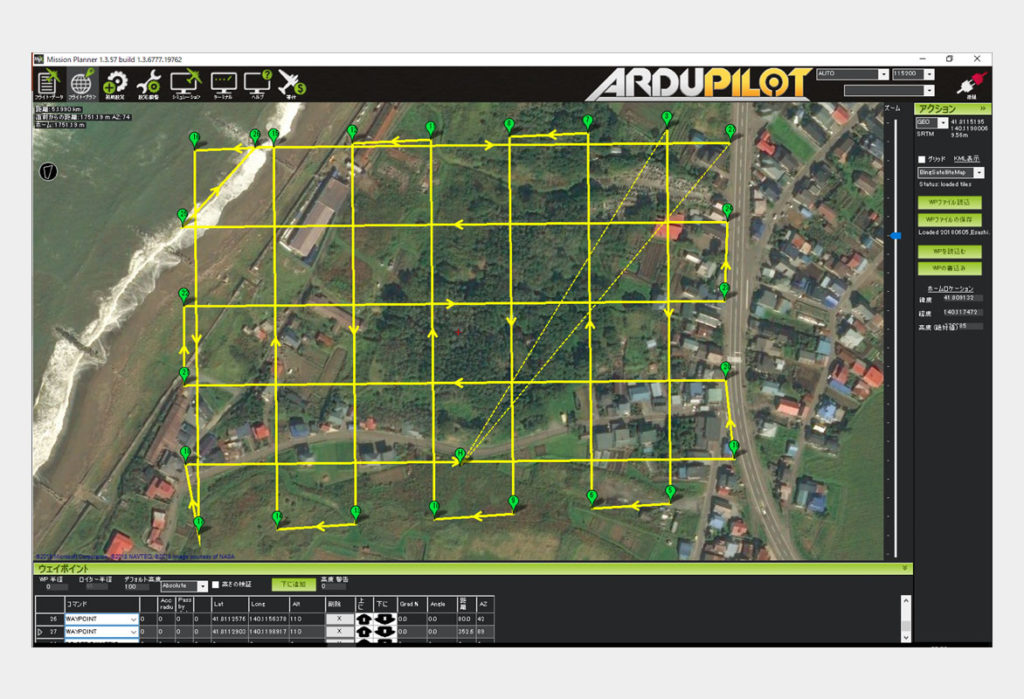
方法:飛行
下記作業フローに従って、Litchiを用いた自動航行を実施しました。フライトは2回に分け、1回目のフライトで機体の挙動確認と撮影設定を行い、2回目でデータ取得のためのフライトを実施しました。

作業フロー(※地上での作業時間をのぞく)
| ファーストフライト(3分※) |
| ・機体チェック・コンパスキャリブレーション ・ホバリング状態での挙動確認 ・目標高度におけるピント合わせ、露出合わせ ・着陸 |
| セカンドフライト(14分※) |
| ・地上でのKLAUの起動とGPS信号安定化のための5分間静止 ・離陸とフライトミッションの開始 ・WayPoint1からタイムラプス撮影の開始 ・着陸 ・GPS信号安定化のための3分間静止 |
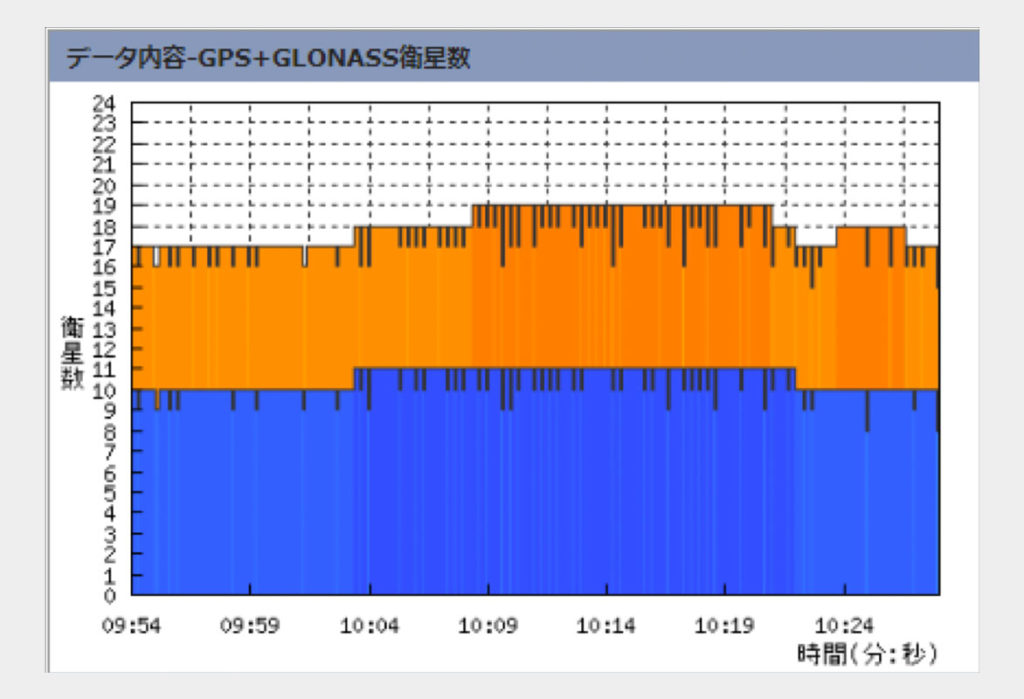
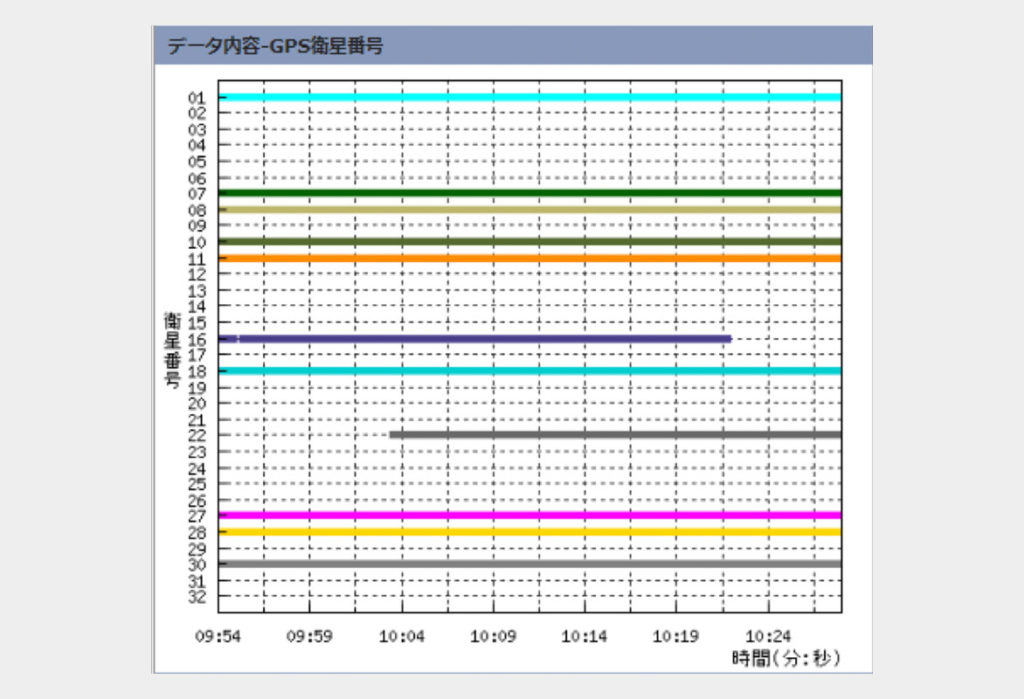
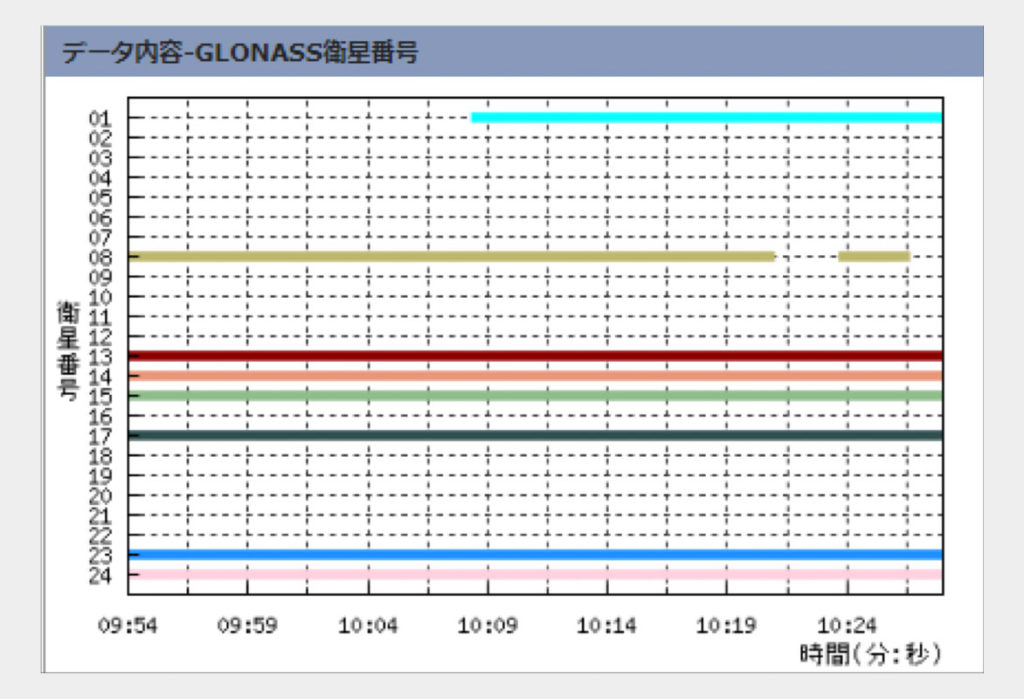
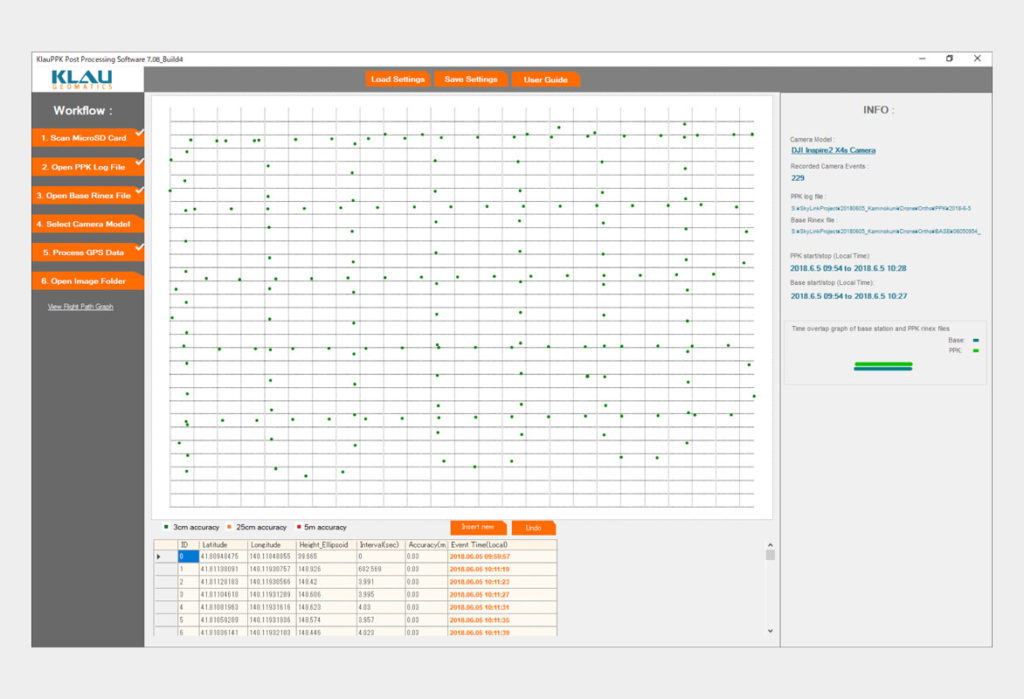
方法:後処理
後処理には、JENOBA社の仮想点データ(GPS+GLONASS, 1秒ごと)を使用。取得衛星数は十分であり、データ欠損も見られませんでした。また、KLAU後処理ソフトによる解析結果も良好であることが確認できました。
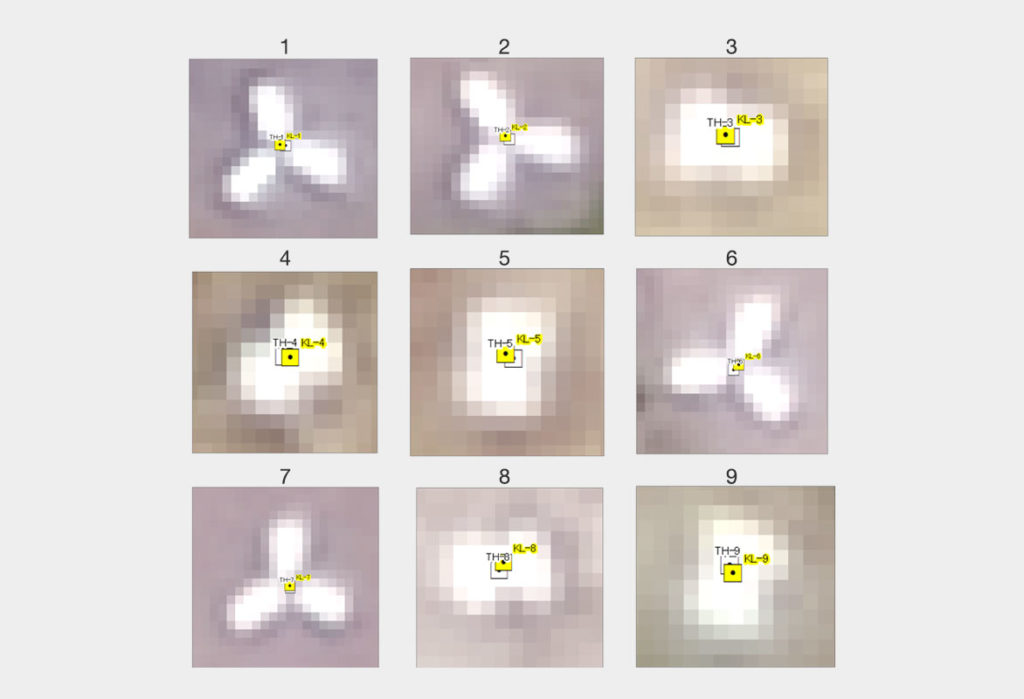
結果1:オルソモザイク画像を用いた水平精度検証
KLAUによる後処理のみを用いて、Pix4Dで3次元点群およびオルソモザイク画像を作成しました。各GCP設置点における水平誤差を目視で確認したところ、良好な結果であることが認められました。

結果2:水平及び垂直誤差の定量的検証
KLAU PPKによる後処理情報を使ってPix4Dによって処理した際のX、Y、Z値の較差を示しました。
KLAUのみの計測でも、XY方向で最大2.8cm、Z方向で最大3.3cmに収まっていることが確認されました。
精度比較表
| ID | 較差X (m) | 較差 Y (m) | 較差 Z (m) |
| TH-1 | 0.001 | 0.014 | -0.020 |
| TH-2 | -0.016 | 0.010 | 0.009 |
| TH-3 | -0.002 | 0.018 | 0 |
| TH-4 | -0.013 | 0.004 | 0.001 |
| TH-5 | -0.006 | 0.020 | -0.028 |
| TH-6 | -0.028 | -0.003 | 0.012 |
| TH-7 | -0.012 | -0.007 | 0.030 |
| TH-8 | 0.003 | 0.015 | -0.031 |
| TH-9 | -0.008 | 0.009 | -0.033 |
| 標準偏差 | 0.0090 | 0.0087 | 0.0209 |
| 最大値(絶対値) | 0.028 | 0.020 | 0.033 |
精度検証レポートの結論
- UAVを用いることで、約11haの範囲を15分程度で測量することができた。
- KLAUによる後処理解析を施すことで、通常のUAVのみでは得られない精度の高い位置座標を得ることができた。
- KLAUを用いることで、国土地理院が定めるUAVを用いた公共測量マニュアル(案)で示されたGCP設置基準を簡素化できる可能性が示された。